
加拿大多倫多大學劉新宇團隊另辟蹊徑,用化學方法把活體秀麗隱桿線蟲 “大腦” 與肌肉系統的連接切斷,再利用光遺傳學和微機器人控制技術實現對單個活體線蟲爬行狀態的閉環控制,可一次性靈活穿越微型迷宮。

圖|活體線蟲爬行狀態閉環控制顯微視圖(來源:受訪者)
近年來,直接利用微生物運動或生物組織來構建生物融合微機器人(又稱為類生命機器人)頗具應用前景,在藥物控制傳遞、細胞內細胞器表征和精密醫療手術等技術已有了重要的應用場景。
然而,微型機器人的設計,在一定程度上受到驅動機構和高密度能源無縫集成等技術瓶頸限制,這種微型機器人的集成度和性能還無法與生物有機體相媲美。
在傳統的微機器人領域,有很多課題組基于機器仿生原理,利用微裝配、原位生長或生物打印等技術,將機器人微結構本體和具有驅動功能的細胞或組織集成,實現生物融合機器人。但這種仿生機器人在微米尺度下,粘性力和摩檫力通常比重力高幾個數量級,這對微型機器人機體結構和執行器的設計、制造和材料開發帶來了較大的困難。
該團隊提出了一種基于線蟲光遺傳學的設計策略,利用活體秀麗隱桿線蟲作為 “微機器人本體”,將線蟲肌肉細胞作為 “驅動器”,通過可控微結構光場對線蟲的蛇形運動實現閉環控制。

圖|活體線蟲軟體微型機器人光遺傳運動控制原理示意圖(來源:受訪者)
相關論文以為題《通過光遺傳運動控制秀麗隱桿線蟲的活體軟微型機器人》(Toward a living soft microrobot through optogenetic locomotion control of Caenorhabditis elegans)發表在 Science Robotics 上。
圖|相關論文(來源:Science Robotics)
由加拿大麥吉爾大學機械工程系博士董先科擔任第一作者,加拿大多倫多大學機械與工業工程系教授劉新宇擔任通訊作者。
該成果可帶來兩方面研究價值,一是為微器人設計原理研究提供了新思路;二是活體線蟲爬行控制技術有望賦能線蟲生物學創新研究。
劉新宇教授向 DeepTech 表示,“我們的初衷是利用機器人技術對秀麗隱桿線蟲進行爬行控制,將這個活體線蟲變成一個可控的軟體微機器人。”
在做該研究之前,該團隊已經對秀麗線蟲微操作領域研究多年,研發了針對自由爬行活體線蟲的機器視覺識別和跟蹤算法,全自動線蟲顯微注射系統,以及用于高速線蟲篩選的微流控系統。
該研究成果具有兩大突出亮點:
第一,該團隊揭示了秀麗隱桿線蟲能夠持續向前蛇形爬行的驅動規律。線蟲向前爬行的主要原因是,秀麗隱桿線蟲如蛇形般的體形結構與它的肌肉收縮強度分布間存在一個相位差,從而通過從頭部到尾部的依次肌肉收縮產生向前推動力,受推力作用活體秀麗隱桿線蟲可以持續向前爬行。
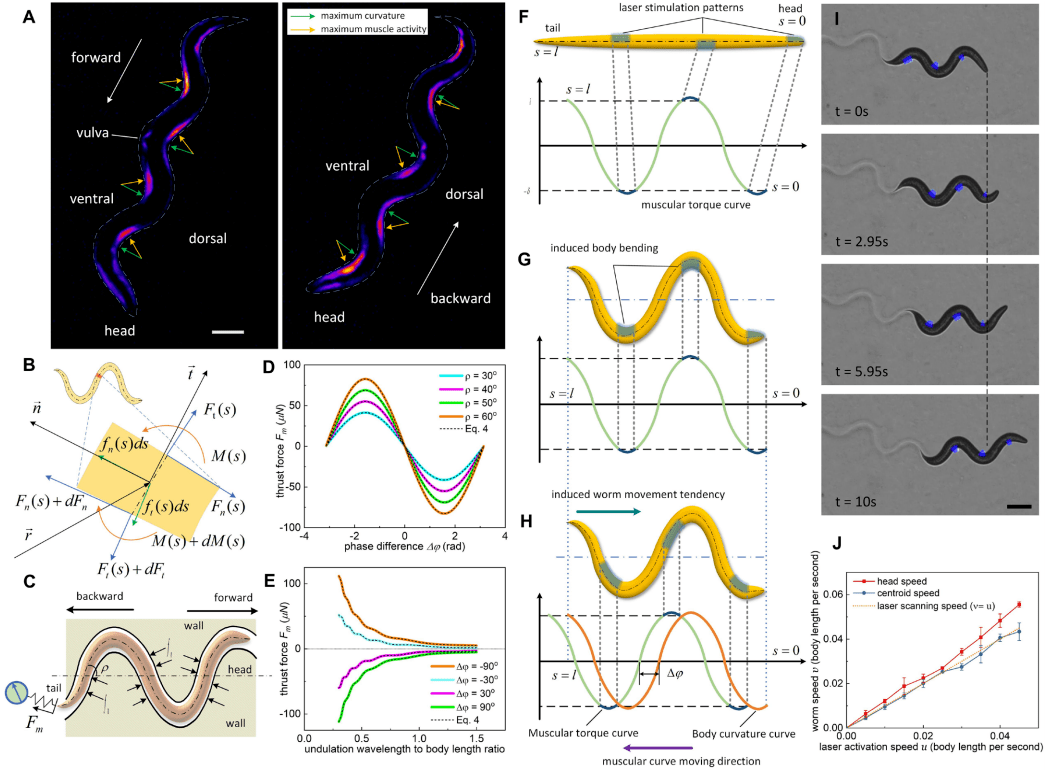
圖|蛇形爬行的推力分析及微光場控制肌肉收縮推力再現(來源:受訪者)
該團隊通過對活體線蟲爬行的熒光成像進行了觀察,并對肌肉收縮時的鈣信號增強做了熒光成像,發現了線蟲肌肉收縮的最大值,然后又通過機械力學建模再次求證,實驗證明 “蛇形相位差” 是秀麗隱桿線蟲向前持續爬行的主要原因。
第二,如何通過機器視覺反饋控制算法實現秀麗隱桿線蟲爬行閉環控制。該團隊利用化學方法將活體秀麗隱桿線蟲進行麻醉,把它的 “大腦”(即線蟲的神經系統)與肌肉系統暫時切斷,再利用光遺傳學的辦法,人為激勵它身體不同部位的肌肉,讓它的肌肉形成了一個對應的收縮分布,保持和體形結構的相位差,使它向前蛇形爬行。
然后,通過機器視覺算法對活體線蟲的爬行進行跟蹤,通過線蟲的外輪廓對秀麗隱桿線蟲進行激勵,根據它所處的位置將分布的光打到它的身上,讓活體線蟲多個肌肉進行收縮,實時復現這樣的相位差實現持續爬行。
值得關注的是,該團隊對秀麗隱桿線蟲實現了點對點的閉環位置控制和方向控制。
首先,可控制線蟲從任意 A 點爬行至任意 B 點;其次,不論線蟲初始爬行方向如何,都可以通過視覺反饋算法將他的爬行方向調整成想要的方向。通過給線蟲規劃一個爬行軌跡圖,就能控制它一次性穿過一個微型迷宮,順利到達目的地。
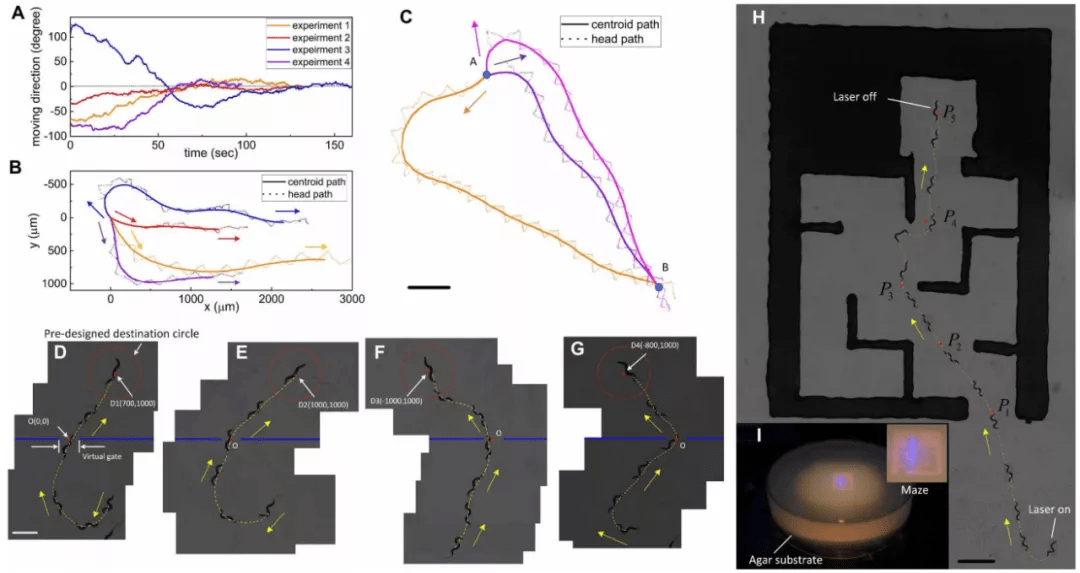
圖|閉環控制對線蟲移動方向和目的地的調控(來源:受訪者)
劉新宇向 DeepTech 表示,利用秀麗隱桿線蟲做研究的優勢在于它是 “活體”,線蟲身體中 “結構部件”、“驅動器”、“能源部件” 的高度無縫集成,為人們呈現了一種大自然設計的微機器人系統。
當然這類活體機器人,其劣勢也比較明顯,比如秀麗隱桿線蟲與人類體內環境不兼容,因此會限制其在醫療上的應用。
另外,線蟲在爬行的過程中也會疲勞,限制線蟲微機器人的工作時間。一條活體線蟲在光驅動受控狀態下可保持爬行在 15 分鐘左右,一旦控制超過 15 分鐘,線蟲肌肉細胞的收縮力就會變小,可控爬行就會受到影響。
可控秀麗隱桿線蟲轉基因變體的前期研究是一套非常復雜的流程,由于不同活體線蟲對麻醉處理的反應差異,該論文中所報道的第一代活體線蟲變體受控成功率相對較低,大概在 7% 左右。而定義是否 “成功” 的標準,是將線蟲麻醉以后看它能否完全受控,如果它能受控就定義為成功;反之,則定義為失敗。
劉新宇教授向 DeepTech 表示,為了提高活體秀麗隱桿線蟲的受控成功率,當前該團隊正在和加拿大多倫多西奈山研究所的 Mei Zhen 教授團隊合作,對秀麗隱桿線蟲轉基因變體進行了改造升級,第二代線蟲變體有望實現超過 50% 的控制成功率,這可以對這項技術的后續研究更有效率,也可以幫助對線蟲生物學不熟悉的其他研究組更容易應用該項技術。
由于并不是所有微機器人學領域的實驗室都熟悉或者都能做這樣的實驗,所以該團隊后期考慮把這套平臺的所有參數和技術做一個開源發表,將所有的實驗細節公開,讓機器人領域和生物學領域的研究者更方便使用。
“一旦新的科研成果被發表,我們會努力做好準備,爭取為全球各個領域的研究組提供第二代活體線蟲樣品。突破科研技術難題,克服平臺障礙,將此技術在不同學術領域推廣,是我們未來幾年的主要目標。” 劉新宇教授說道。
秀麗隱桿線蟲的神經細胞只有 302 個,而且每一個神經細胞互相連接的圖譜都已被研究清楚,科研人員可以通過高分辨率熒光成像辦法去研究,活體線蟲不同爬行為下神經細胞的信號傳導機理,因此該研究成果可直接應用于基礎神經科學研究,并且短期即可找到應用前景。
微米級機器人在醫療領域有很高的應用價值,比如可以在人體內自主行動,把藥物精準地送到能發揮藥效的地方,還可以輔助精子移動幫助人工受孕。
“然而,該成果短期內很難直接用于醫療領域,在解決行業痛點及大規模商業化落地上仍不成熟。比如,在臨床應用中,目前很難將活體線蟲植入人體做藥物遞送或其他應用,在技術和倫理層面面臨一定的障礙。” 劉新宇表示。
第一,將活體線蟲植入體內做藥物提送,面臨倫理障礙。秀麗隱桿線蟲屬于一種寄生蟲,把它植入人體內做藥物遞送,從倫理或者從心理上患者對它的接受程度會有很大的障礙,在短期之內找到克服這個難題的解決方法具有一定挑戰。
第二,秀麗隱桿線蟲光驅動原理不適合體內應用,這是主要技術障礙之一。臨床中利用的最多的是磁控和聲控驅動,當機器人進到人體以后,磁場和聲控都可以很容易將藥物遞送到更深的身體組織。由于秀麗桿線蟲是基于光學驅動的,在技術層面上如何實現體內線蟲光驅動,目前該團隊持保守態度。
未來,該團隊將會對秀麗隱桿線蟲活體的基因結構進行改造,尤其是對它麻醉的過程做一個升級,使它的麻醉過程重復性更好,可以很大程度提高線蟲控制的成功率,這是他們接下來主攻的一點;另外該團隊將與 Mei Zhen 教授和其他生物線蟲實驗室合作,將該實驗技術和平臺應用到線蟲基礎生物學創新研究。
劉新宇向 DeepTech 表示,“我們團隊在開始這項研究時,主要出于好奇心和興趣驅動,至于最終研究成果適合哪些未來應用場景,可以解決哪些實際問題,當時并沒有找到清晰路徑。而且,基礎科學研究與應用轉化的先后順序有時很難分清,只要我們保持好奇心,全力推動新知識產生和技術進步,很多開創性成果在之后的深入研究過程中,會找到意想不到的應用場景。”

圖|劉新宇(來源:受訪者)
開展本研究的過程中,該團隊逐漸認識到所開發的活體線蟲運動控制技術,在線蟲生物學基礎研究上的應用前景。例如,該技術將允許團隊對線蟲不同蛇形爬動模式下的生物力學原理進行試驗測量和建模研究。
另外,該團隊將和 Mei Zhen 團隊進一步合作,深入研究線蟲嗅覺、趨光、趨熱等行為的神經生物學原理。
劉新宇向 DeepTech 表示,“如今,中國國內環境有一個非常獨特的優勢,科研與產業結合非常緊密,產業層面需求的反哺,使科研工作者的思路更加清晰。”
 金大立免費服務熱線
金大立免費服務熱線 地址:成都彭州市工業開發區天彭鎮旌旗西路419號
地址:成都彭州市工業開發區天彭鎮旌旗西路419號二維碼
